Калибровка и позиционирование сервоприводов
Калибровка сервоприводов робота
Зачем нужна калибровка сервоприводов
Калибровка робота - это установка его стартового или начального положения. Для чего это необходимо? В процессе выполнения заданий или написания программ Вы будете давать роботу команды, например, перенести груз из одной точки в другую. Расстояние между точками расположения груза Вы, конечно, будете измерять в сантиметрах или миллиметрах. Параметры же перемещения рычагов робота сервоприводами измеряются в градусах.
Таким образом, Вам будет необходимо точно рассчитать на сколько градусов влево или вправо, вверх или вниз, вперёд или назад робот должен переместить клешню для захвата или освобождения груза. И чтобы точно попасть в место, где нужно захватить или освободить груз необходимо знать, откуда, с какого местоположения башни и (или) манипулятора робот должен начинать отсчитывать своё передвижение.
Такое стартовое или начальное местоположение устанавливается для каждого сервопривода:
- управляющего поворотом башни направо или налево;
- управляющего рычагом манипулятора для перемещения клешни вверх или вниз;
- управляющего рычагом манипулятора для перемещения клешни вперёд или назад;
- управляющего захватом клешни.
В таком положении считается, что текущее перемещение башни или манипулятора равно 0. Дальше при движении из начального положения увеличиваются (для перемещения по часовой стрелке) или уменьшаются (для перемещения против часовой стрелки) значения угла перемещения в градусах.
Стартовое или начальное положение сервоприводов робота устанавливается при изготовлении. Но в процессе транспортировки или погрешностей при сборке робота из набора, стартовое положение башни и (или) рычагов манипулятора может сместиться.
Калибровка необходима для установки верного стартового (начального) положения сервоприводов робота.
Как проверить верность стартового (начального) положения робота
Для проверки верности стартового (начального) положения сервоприводов робота, робот необходимо установить в стартовое положение. Это возможно двумя способами:
Первый. Робот автоматически устанавливается в стартовое (начальное) положение при включении питания.
Второй. Для принудительной установки робота в стартовое положение в процессе работы, необходимо нажать кнопку «Меню» пульта управления и выбрать пункт «Стартовое положение».

Проверка правильности положения башни манипулятора
В случае, если угол расположения башни относительно основания отличается от перпендикулярного больше допустимых значений, требуется калибровка сервопривода поворота башни.
Проверка правильности положения рычага перемещения клешни вверх и вниз
Верность стартового (начального) расположения рычага перемещения клешни вверх и вниз проверяется взаимным расположением установочных отметок на левой стороне башни робота и рычаге перемещения вверх, вниз. Отметки должны находится на одной прямой линии. Допускаются отклонения не более 2 градусов от прямой линии.
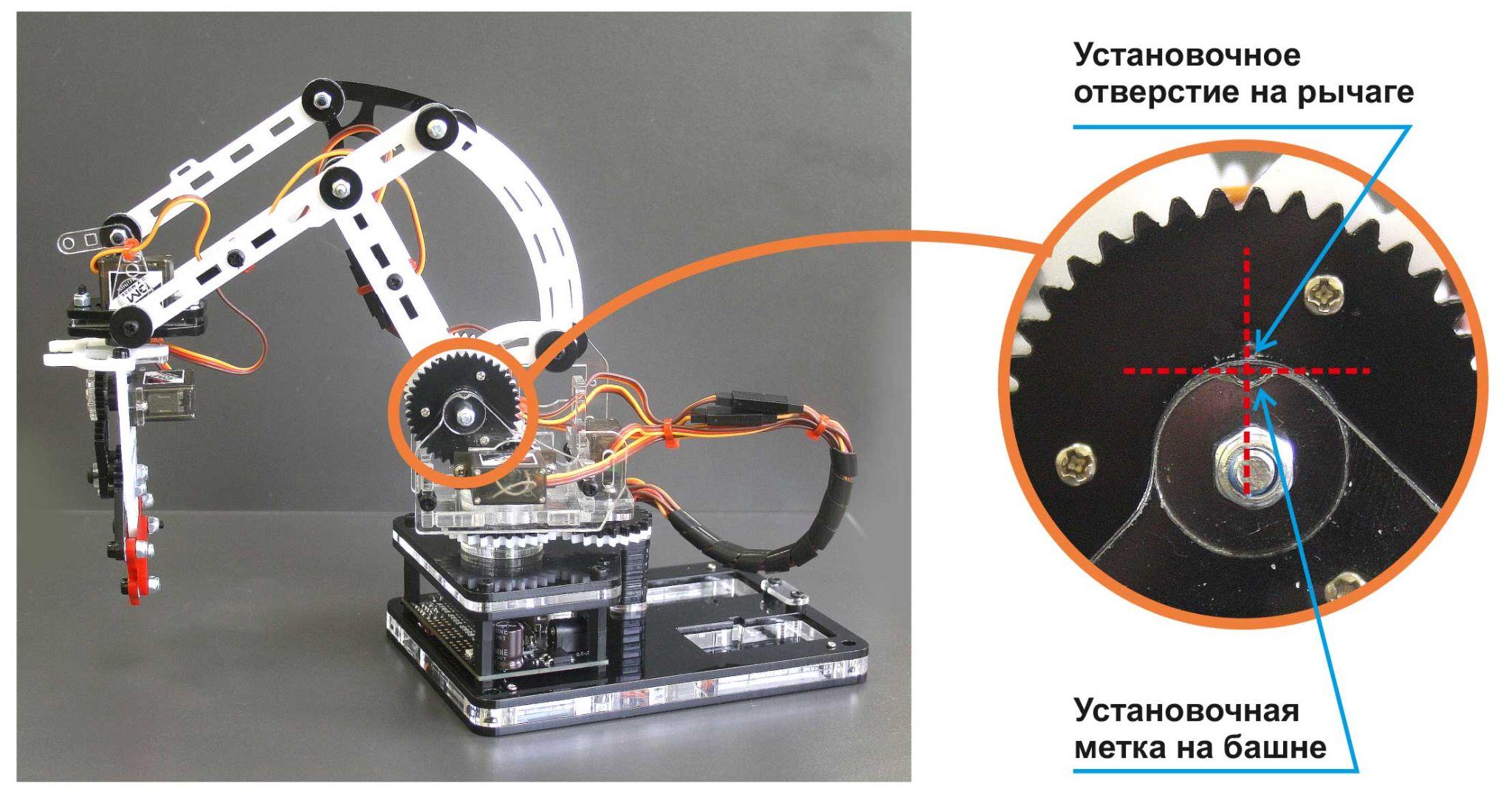
В случае, если установочные метки смещены относительно прямой линии вправо или влево больше допустимых значений, требуется калибровка сервопривода рычага перемещения вверх, вниз.
Проверка правильности положения рычага перемещения клешни вперёд и назад
Верность стартового (начального) расположения рычага перемещения клешни вперёд и назад проверяется взаимным расположением установочных отметок на правой стороне башни робота и рычаге перемещения вперёд, назад. Отметки должны находится на одной прямой линии. Допускаются отклонения не более 2 градусов от прямой линии.
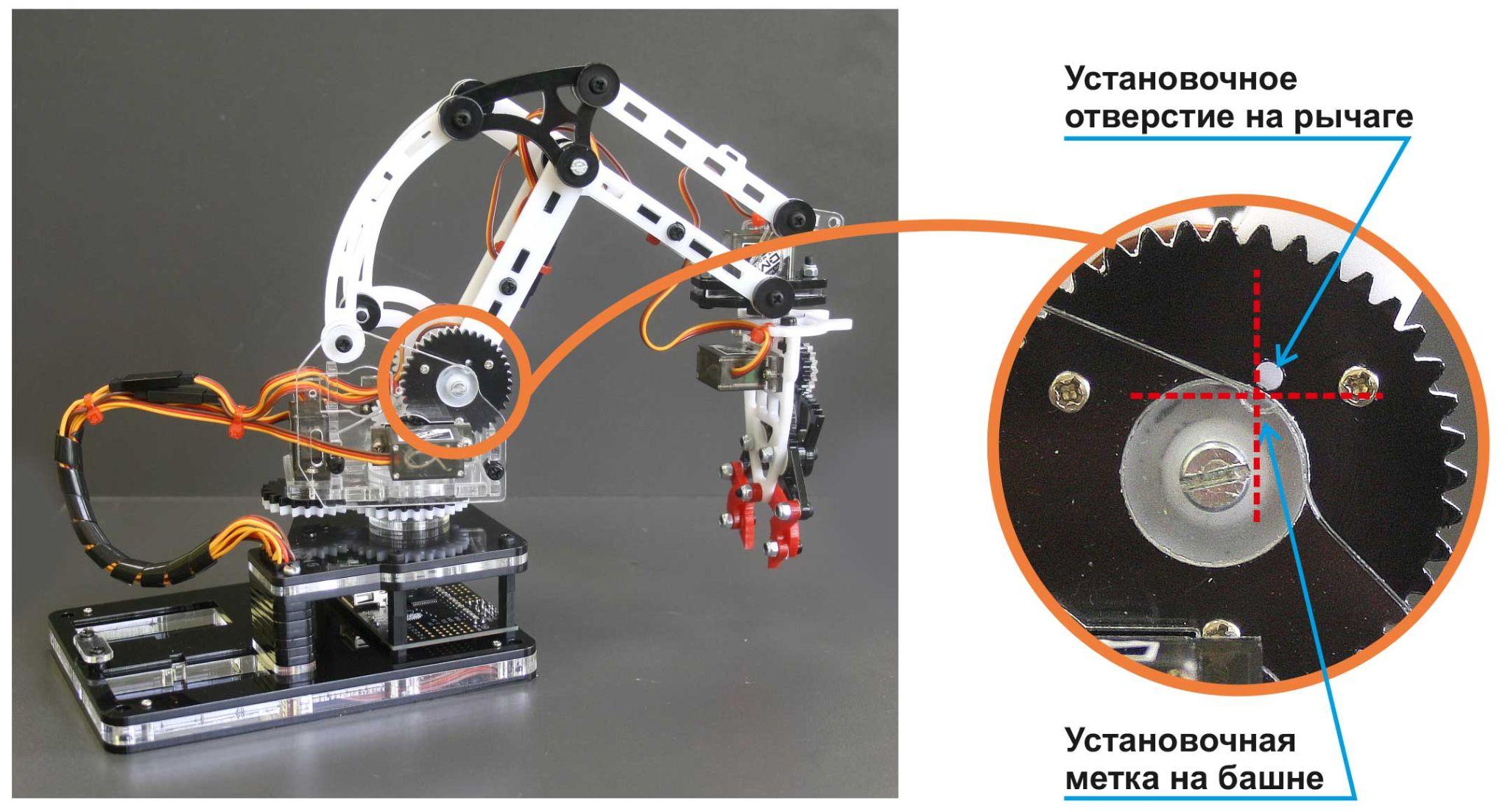
В случае, если установочные метки смещены относительно прямой линии вправо или влево больше допустимых значений, требуется калибровка сервопривода рычага перемещения вперёд, назад.
Проверка правильности положения рук клешни
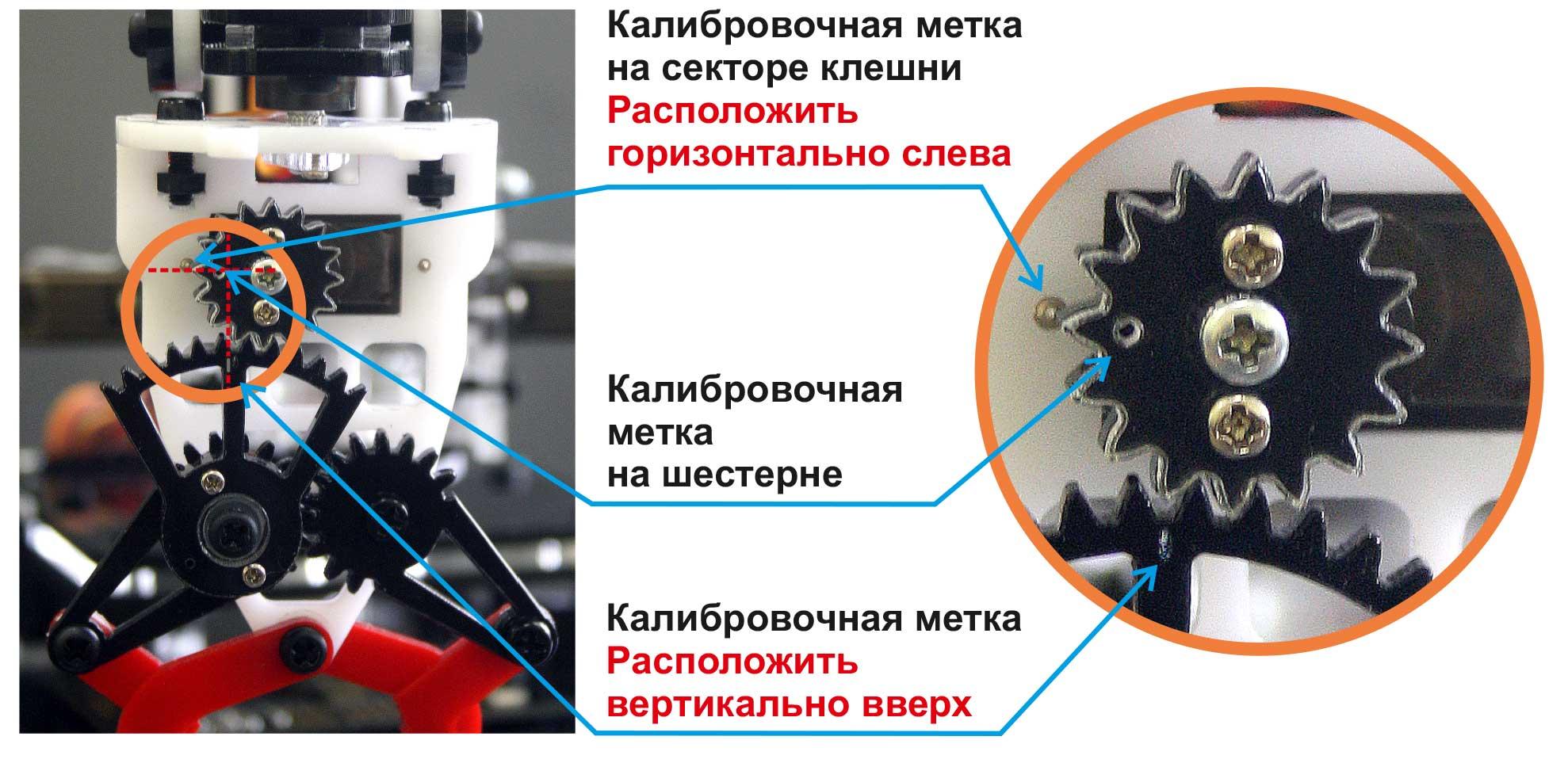
Верность стартового (начального) расположения рук клешни проверяется взаимным расположением установочных меток на секторе клешни и шестерни её сервопривода. Отметки должны находится на одной прямой линии. Допускаются отклонения не более 2 градусов от прямой линии.
В случае, если установочные метки смещены относительно прямой линии вправо или влево больше допустимых значений, требуется калибровка сервопривода перемещения рук клешни.
Как калибровать сервоприводы робота
 и выбрать пункт «Режим калибровки».
и выбрать пункт «Режим калибровки».В режиме калибровки на пульте управления слева необходимо выбрать сервопривод, который Вы хотите откалибровать. Затем с помощью кнопок управления установите сервопривод в требуемое положение и сохраните установленное значение с помощью кнопки
 , расположенной справа.
, расположенной справа.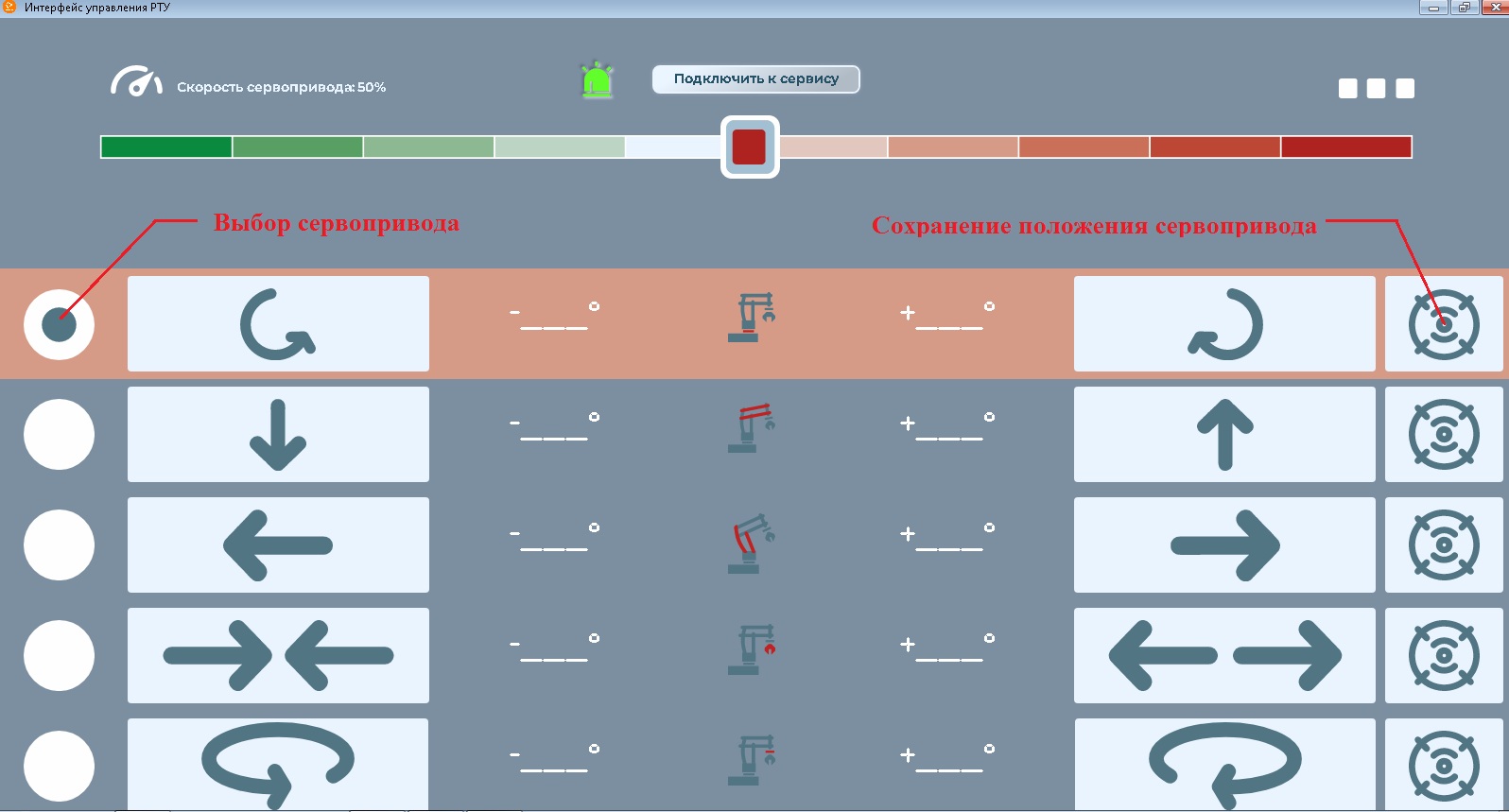
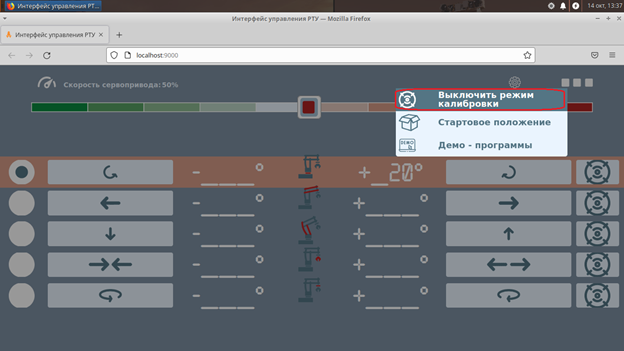
Режим калибровки работает только в стандартном варианте интерфейса пульта управления.
Позиционирование сервоприводов
Зачем нужно позиционирование сервоприводов
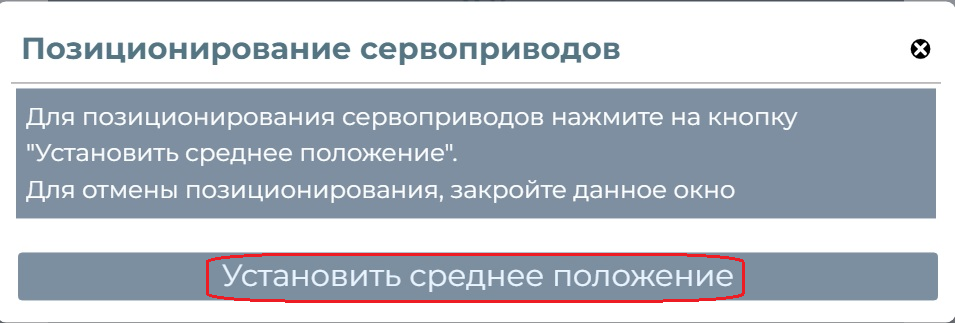
Перед тем как в первый раз начать работу с новым роботом или роботом после ремонта и замены сервоприводов, необходимо провести юстировку сервоприводов, установив их в начальное положение. Для этой операции используется позиционирование сервоприводов.Выполнение позиционирования сервоприводов
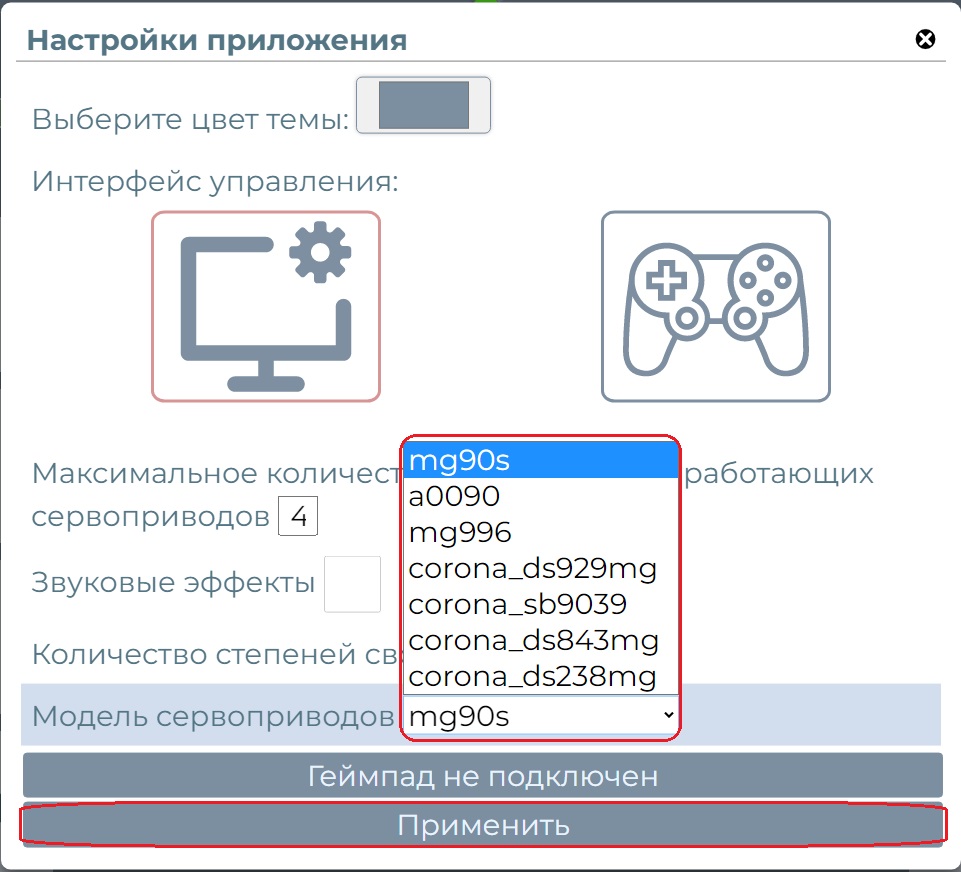
Подключите робота имеющимся в наборе кабелем USB к Вашему ПК и запустить пульт управления РТУ. Перейти в настройки и выбрать модель сервопривода, установленного на Вашем роботе. Модель сервопривода указана на коробке от робота.

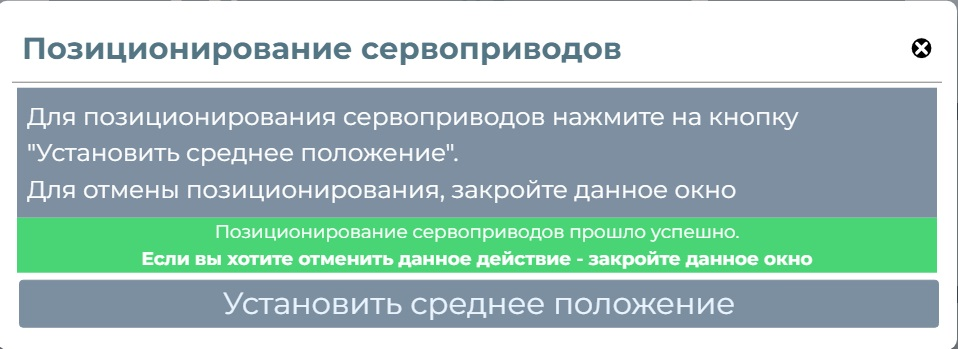
Появится сообщение об успешном позиционировании сервоприводов. Для того чтобы отменить позиционирование необходимо закрыть окно позиционирования.