ОС Linux
Установка
Установка из deb-пакета пульта управления роботом осуществляется в директорию: /usr/local/robohand_remote_control
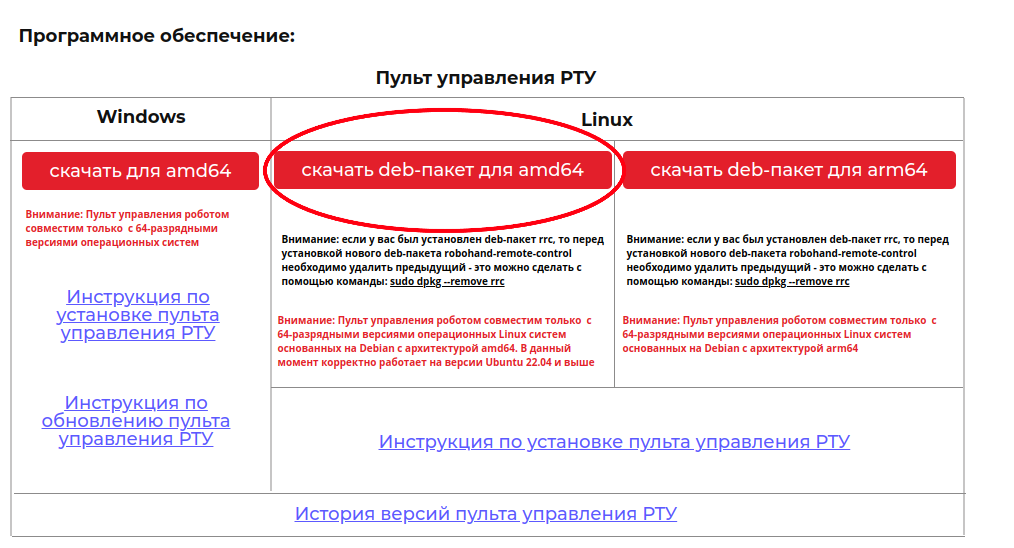
- Архитектура amd64
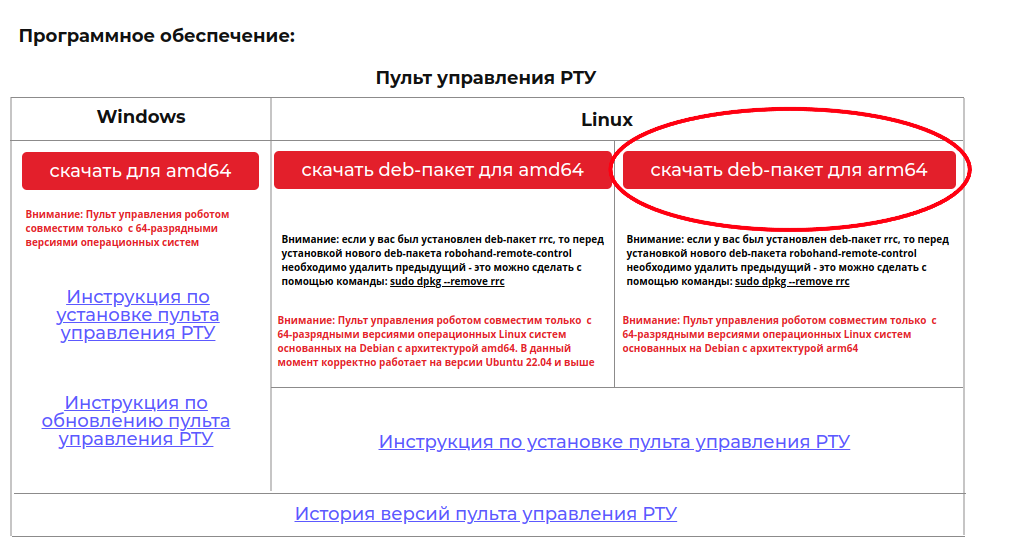
- Архитектура arm64
- Для начала необходимо скачать deb-пакет пульта управления роботом со страницы скачивания с официального сайта Робоинтеллект:
Или открыть терминал (командную строку) комбинацией клавиш Ctrl+Alt+T, перейти в директорию «Загрузки» с помощью команды cd:
cd Загрузки
и воспользоваться командой wget:
wget -O robohand_remote_control_amd64.deb https://download.robointellect.ru/robohand_remote_control/robohand_remote_control_amd64.deb
Перед установкой deb-пакета с пультом управления роботом необходимо установить зависимости:
sudo apt update
sudo apt install gcc libgtk-3-0 libayatana-appindicator3-1 make i2c-tools dkms build-essential pkg-config libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev gstreamer1.0-plugins-good
- После скачивания deb-пакета необходимо установить ПО пульта управления. Для этого откройте терминал (командную строку) комбинацией клавиш Ctrl+Alt+T, перейдите в директорию «Загрузки» с помощью команды cd:
cd Загрузки
И введите команду для установки программного обеспечения:
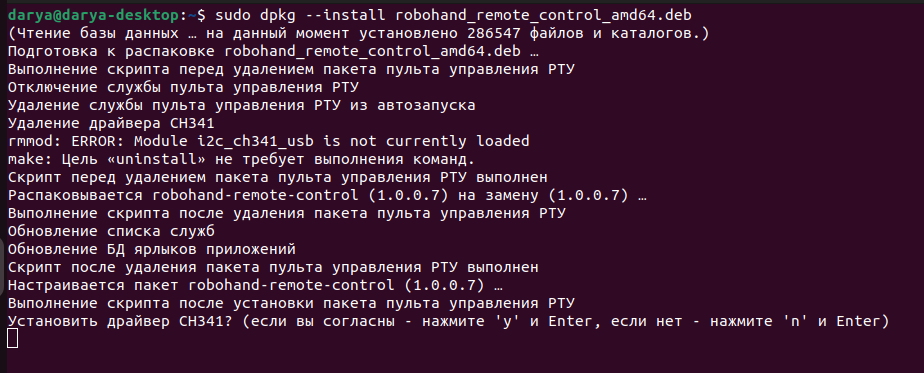
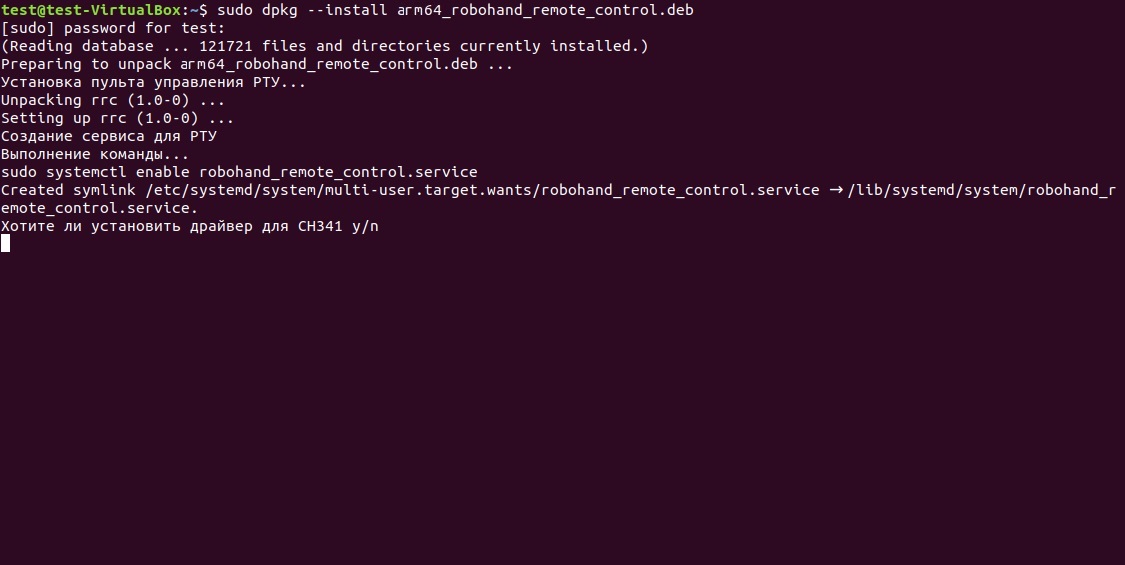
sudo dpkg --install robohand_remote_control_amd64.deb
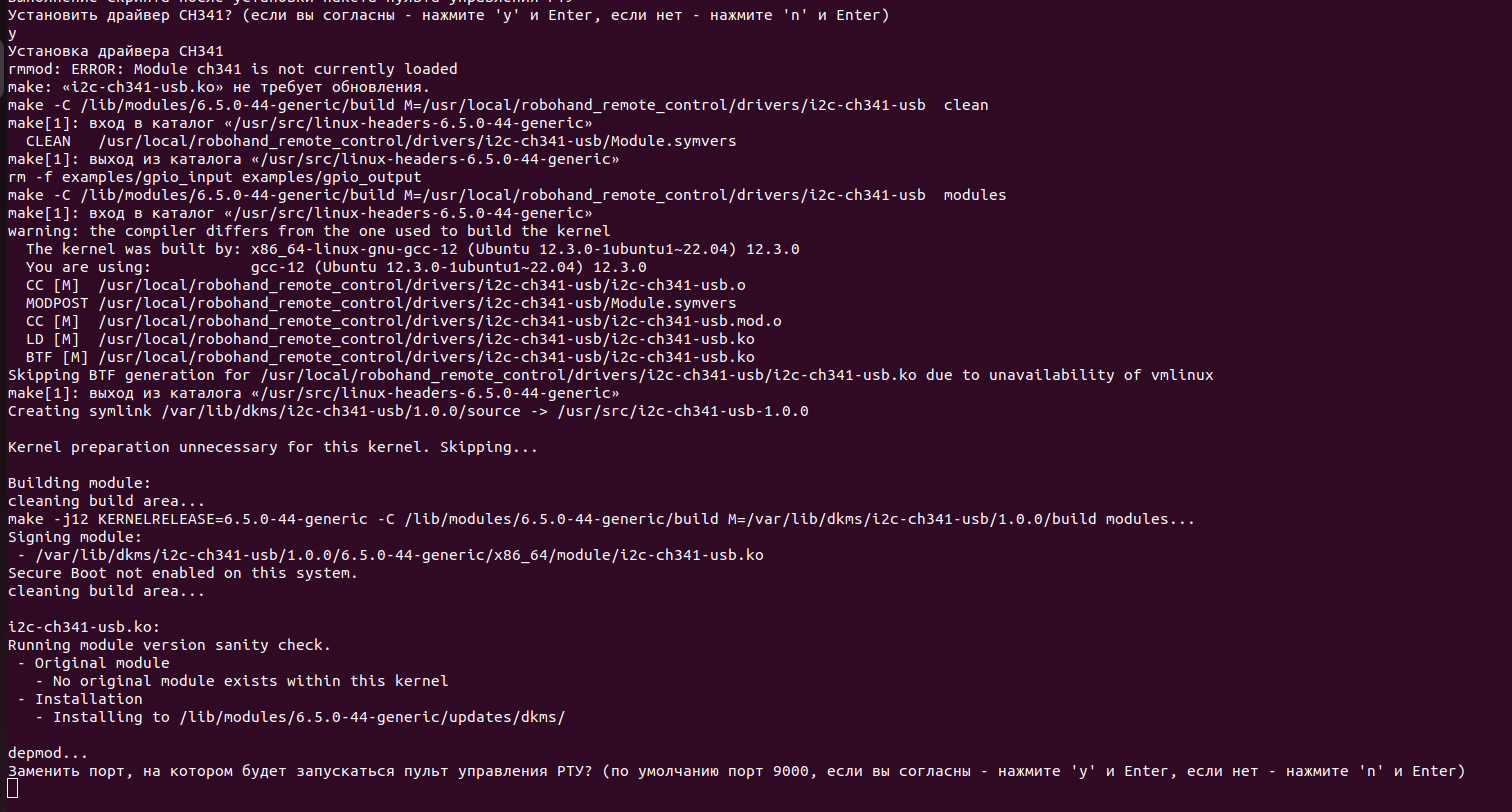
- Во время установки, Вам будет предложено установить драйвер для CH341. Для согласия необходимо ввести в терминале "y" и нажать Enter. Если установка не требуется - ввести "n" и также нажать Enter.
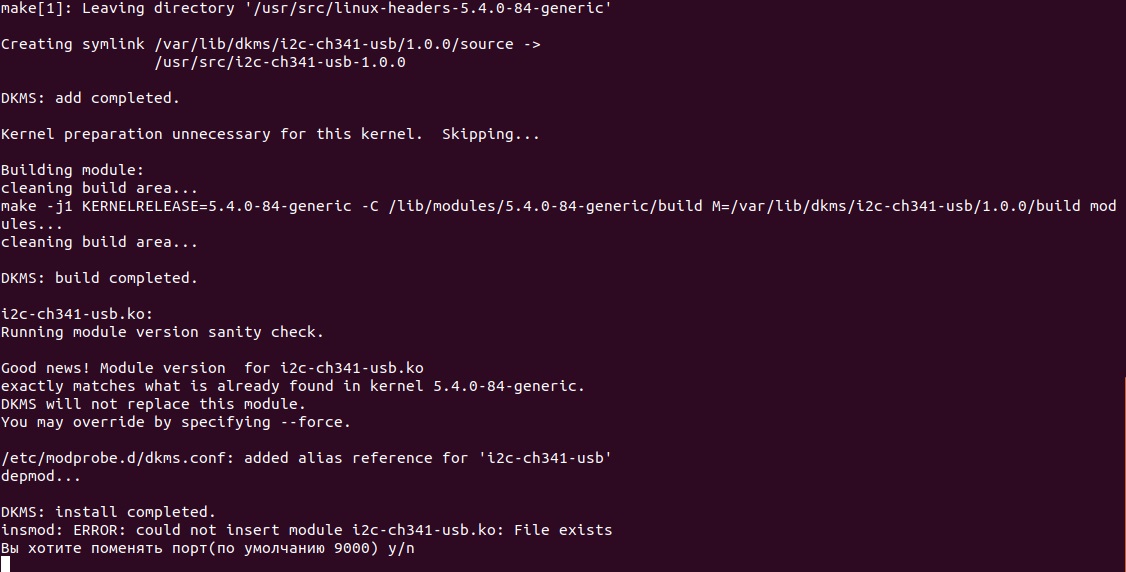
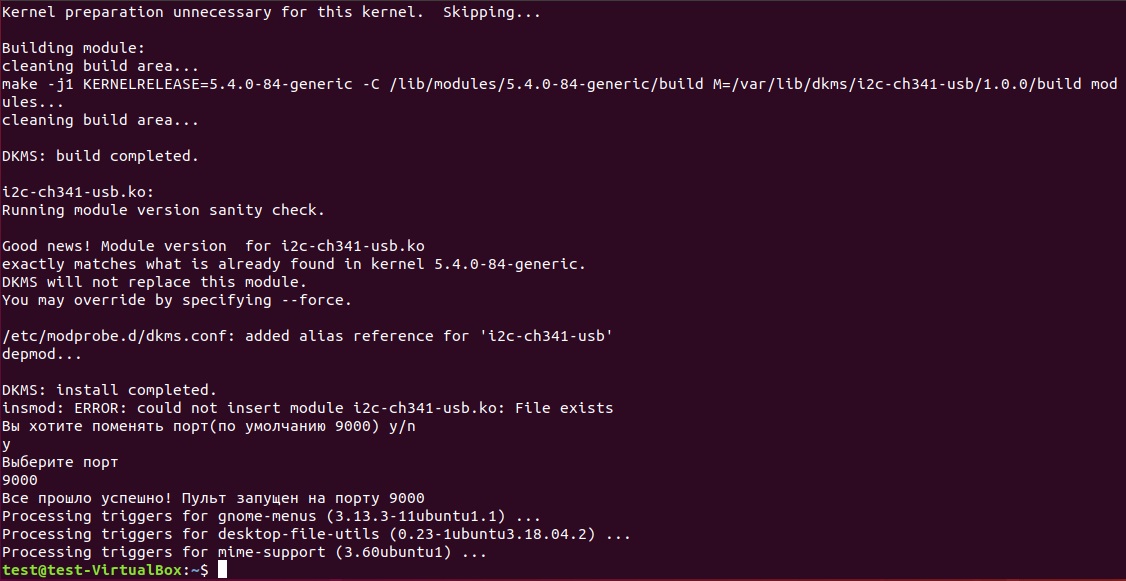
- Также Вы сможете заменить порт по умолчанию, на котором будет запускаться пульт управления роботом. Для замены порта необходимо ввести в терминале "y" и нажать Enter, после чего ввести нужный порт в терминале и нажать Enter. Если замена не требуется - ввести "n" и также нажать Enter.

- После этого дождитесь установки deb-пакета.

Во время установки deb-пакета Вы можете наблюдать ошибку в терминале "ERROR: Module ch341 is not currently loaded". Не пугайтесь, так мастер установки драйвера CH341 информирует Вас о том, что на данный момент драйвер не установлен и он попробует его установить.
![]()
- Для начала необходимо скачать deb-пакет пульта управления роботом со страницы скачивания с официального сайта Робоинтеллект:
Или открыть терминал (командную строку) комбинацией клавиш Ctrl+Alt+T, перейти в директорию «Загрузки» с помощью команды cd:
cd Загрузки
и воспользоваться командой wget:
wget -O robohand_remote_control_arm64.deb https://download.robointellect.ru/robohand_remote_control/robohand_remote_control_arm64.deb
Перед установкой deb-пакета с пультом управления роботом необходимо установить зависимости:
sudo apt update
sudo apt install gcc libgtk-3-0 libayatana-appindicator3-1 make i2c-tools dkms build-essential pkg-config libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev gstreamer1.0-plugins-good
- После скачивания deb-пакета необходимо установить ПО пульта управления. Для этого откройте терминал (командную строку) комбинацией клавиш Ctrl+Alt+T, перейдите в директорию «Загрузки» с помощью команды cd:
cd Загрузки
И введите команду для установки программного обеспечения:
sudo dpkg --install robohand_remote_control_arm64.deb
- Во время установки, Вам будет предложено установить драйвер для CH341. Для согласия необходимо ввести в терминале "y" и нажать Enter. Если установка не требуется - ввести "n" и также нажать Enter.
- Также Вы сможете заменить порт по умолчанию, на котором будет запускаться пульт управления роботом. Для замены порта необходимо ввести в терминале "y" и нажать Enter, после чего ввести нужный порт в терминале и нажать Enter. Если замена не требуется - ввести "n" и также нажать Enter.
- После этого дождитесь установки deb-пакета.
Во время установки deb-пакета Вы можете наблюдать ошибку в терминале "ERROR: Module ch341 is not currently loaded". Не пугайтесь, так мастер установки драйвера CH341 информирует Вас о том, что на данный момент драйвер не установлен и он попробует его установить.
При использовании RoboIntellect SDK, который устанавливается вместе с пультом управления роботом возникает трудность: Вам необходимо
держать библиотеку librisdk.so и ее вспомогательные библиотеки рядом с Вашими исполняемыми файлами, а в Ваших
программах указывать относительный путь к библиотеке.
Лучшим вариантом является использование переменной среды с указанием пути к библиотеке RoboIntellect SDK. Ниже показан пример
использования данного подхода в коде на языке программирования Python.
# Подключаем внешнюю библиотеку для работы с SDK
platform = platform.system()
if platform == "Windows":
libName = "librisdk.dll"
if platform == "Linux":
libName = "librisdk.so"
libPath = os.getenv("LIB_RISDK")
lib = cdll.LoadLibrary(libPath + libName)
Вы можете самостоятельно задать переменную среды LIB_RISDK с указанием пути до библиотеки RoboIntellect SDK (/usr/local/robohand_remote_control/librisdk.so) (пример запуска программы)
Обновление версии
Т.к. на данный момент для ПО «Пульт управления РТУ» (Робототехническое устройство) не предусмотрено автоматического обновления в случае выхода новых версий, процесс обновления состоит из двух шагов:
Произвести удаление текущего ПО «Пульт управления РТУ».
Установить новую версию ПО «Пульт управления РТУ».
Удаление
Для удаления deb-пакета с ПО «Пульт управления РТУ» необходимости выполнить команду:
sudo dpkg --remove robohand-remote-control